Robots are becoming increasingly mobile and autonomous in busy factories and warehouses, so researchers at New Jersey Institute of Technology and four other universities are working out how to keep electronic employees aware of wifi networks at all times.
The team is betting on the success of smart reflectors that tweak a wireless signal’s position, rather than brute-forcing the problem by merely adding more access points until complete coverage is achieved. The reflectors are technically known as reconfigurable intelligent surfaces or software-defined surfaces. They’re not new, but the novelty is applying them to moving targets — what happens if a robot navigates itself into a radio dead zone?
“If they are blocked, then they have no way to access the central server,” said NJIT’s Arnob Ghosh, assistant professor of electrical and computer engineering.
It’s reminiscent of the droid army turning off and falling down when their control ship is destroyed in Star Wars Episode I: The Phantom Menace.
“The coolest part that we talk about is, these are all electromagnetic waves. So they can be reflected from somewhere — it can be ceilings, it can be walls — but most of them are kind of absorbed. If you can reflect them in an intelligent way, they can be your friend. So this is what we are doing.”
Surfaces on ceilings, utility poles, traffic lights or even tall buildings could become the ultimate wireless infrastructure for drones, Ghosh added. Alternately, surfaces could be installed on drones themselves for even more flexibility in how wireless beams are adjusted to receiving systems.
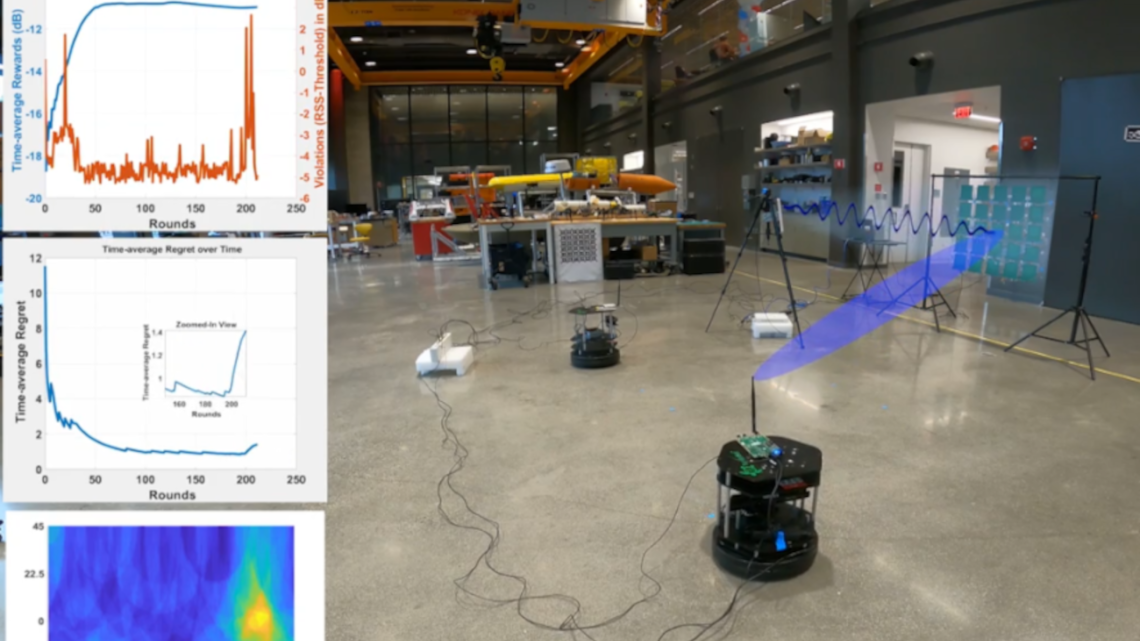
The idea won Best Paper this fall at the ACM International Symposium on Mobile Ad Hoc Networking and Computing, held in Houston. There is an accompanying video demonstration. In addition to Ghosh, teammates Kubra Alemdar from Northeastern, Vini Chaudhary of Mississippi State, Ness Shroff at Ohio State and Kaushik Chowdhury in Texas - Austin documented their ideas in RIS-Enabled Mobile Beamforming through Kernelized Bandit Learning, funded by the National Science Foundation AI Institute and the Army Research Laboratory.
Gambling on better radio beams
To illustrate how reconfigurable surfaces would work, the team applied a thought experiment from casino gambling called the multi-armed bandit. The experiment involves trying a machine you haven't played much to see if it pays off better than expected, or keep playing the machine that you think is best to maximize its immediate rewards. In engineering this is seen as an explore/exploit tradeoff, where the multiple virtual arms represent different beam patterns and the player is the access point, choosing to try a different beam or stick with one that’s working well enough.
They also added a kernel — a mathematical function to inform their algorithm that if one beam is performing well, then similar beams nearby are also likely to perform well. Similarly, the software intentionally forgets unhelpful data.
So far, they’ve only tested the idea to communicate with a single moving robot. They’re on the cusp of testing it with multiple robots, which Ghosh said presents a greater challenge: how does the reflecting surface configure itself to robots that might have conflicting requirements?
“We have this algorithm a little bit figured out,” he said. “We are going into this region where robots are kind of active. They are lively. They can now see, they can now orient themselves in which direction to communicate, using this learning-based algorithm. So this can open a lot of new avenues for research and interesting questions.”